
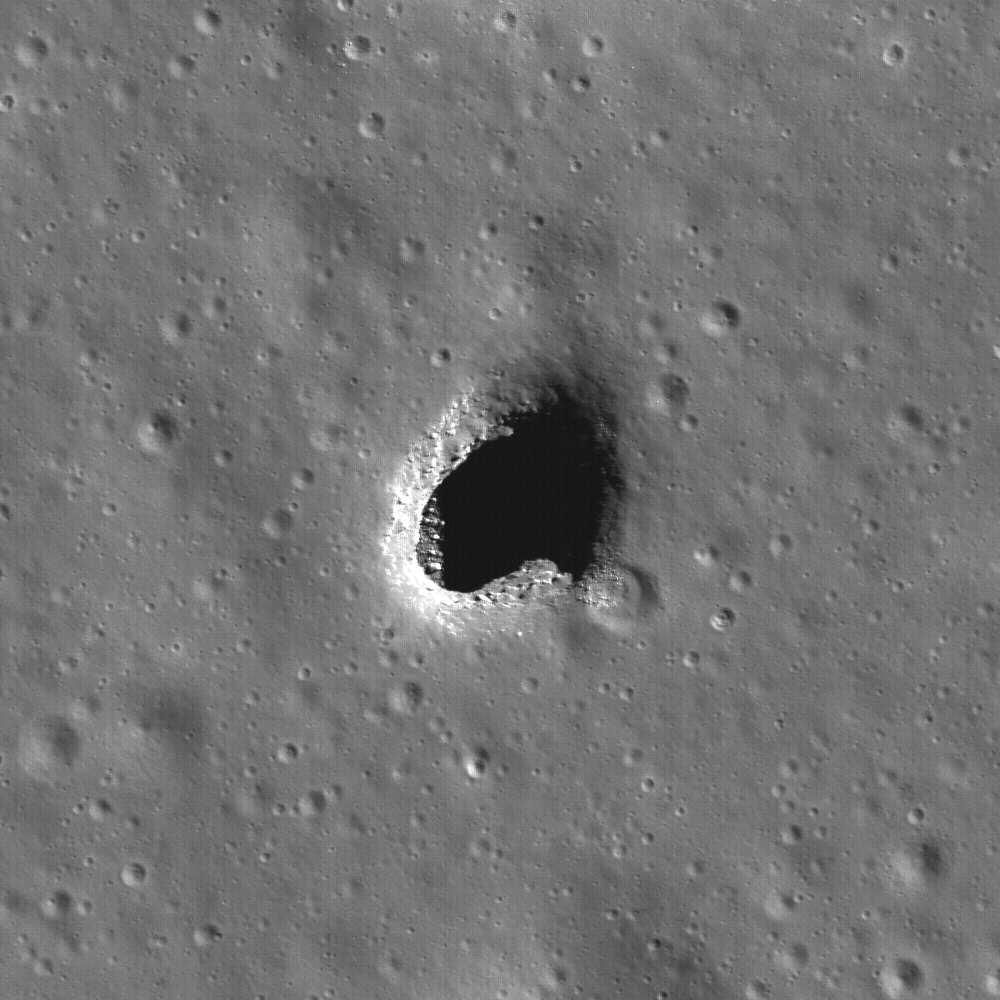
The Moon’s surface is covered by millions of craters, but it also hosts hundreds of very steep-walled holes known as pits. Like doorways to the underworld, photos of some pits clearly show a cavern beneath the Moon’s surface, suggesting that they are ‘skylights’ into extensive lava tubes that can be extremely wide and could even extend for hundreds of kilometers. These tubes are thought to have formed during lava flows billions of years ago, when the Moon was still geologically active.
Credit: NASA/Lunar Reconnaissance Orbiter Camera (LROC)/Science Operations Center (SOC)
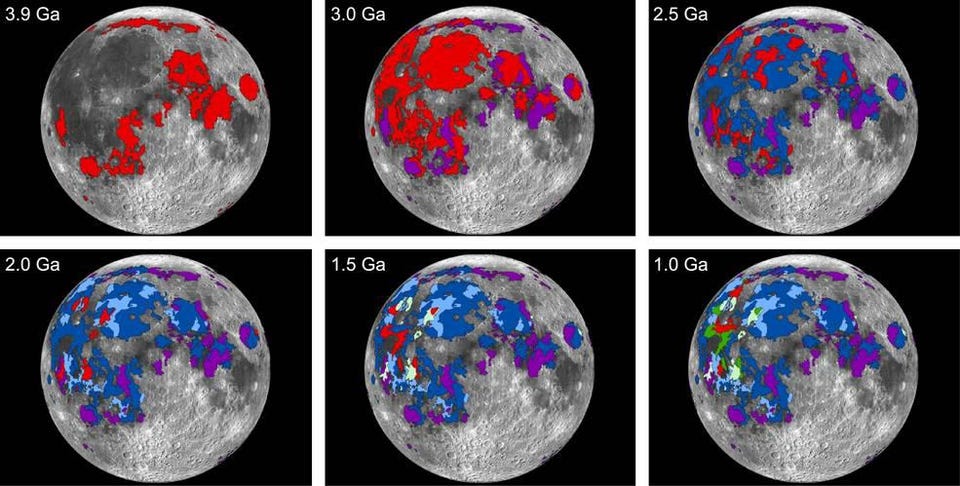
Credits: NASA/MSFC/Debra Needham; Lunar and Planetary Science Institute/David Kring
Before caves were known to exist on planetary bodies beyond Earth, scientists looked at caves on Earth and hypothesized that similar features might exist elsewhere. Even now, when caves have been proven to exist on the Moon and Mars, Earth analogs are one of the best sources of information about planetary caves as satellites provide limited and low-resolution views into subsurface features. Known mechanisms for cave formation on Earth are likely to form caves on other planets as well. These mechanisms include lava flows, volcano-tectonic fractures, and chemical dissolution.
These pits are prime targets for possible future spacecraft, robots, and even human interplanetary explorers. Caves and caverns could be ready-made shelters for future Moon and Mars explorers and colonists. Discoveries to date look down from on high with satellites but cannot reveal the wonders of caves. They cannot enter, touch, or view pits up close. Genuine exploration is only achievable through surface missions. Robotic missions can assess suitability for safe entry and habitation, plus inform techniques for developing subsurface infrastructure.
Some Basic Advantages of Lunar Caves in the Moon Explorations
The existence of caves on the Moon was only theoretical until two recent orbital missions (Kaguya and the Lunar Reconnaissance Orbiter, or LRO) imaged pits on the surface that appear similar to “skylights” in terrestrial lava caves, they are called skylights because of small portions of the tube roofs that have collapsed, exposing interior voids and allowing access to an underground cave.
Lava tubes might be the best candidate sites for future lunar bases because of their stable thermal conditions and potential to protect people and instruments from micrometeorites and cosmic ray radiation. A stable and protected environment that would benefit future human explorers also makes them an enticing target for scientific study. It can also provide an additional benefit, instead, we dug the lunar surface for minerals, the caves can be a good option to collect these materials.
Caverns offer a few key protections for humans living in space. They provide crucial cover from harmful radiation given off by the sun and other cosmic sources, something that Earth’s magnetic field takes care of here. The surrounding rock also serves as an insulator against temperature swings that take the Moon’s surface from hot enough to boil water to less than -200 degrees Fahrenheit (-129 degrees Celsius) in the course of a single day. The cave holds steady at a relatively comfortable around -4 Fahrenheit (-20 degrees Celsius) since the Moon’s weather can’t penetrate its thick walls. One lunar day lasts about 29 Earth days, meaning surface locations endure about two straight weeks of daylight followed by two weeks of darkness. Finally, it also offers some protection from the small meteorites that periodically bombard the Moon, although larger collisions are still a worry.
Any underground cavity on the Moon, after all, would provide shielding from sandblasting from the rocket engines of landing or departing spacecraft. These are extremely favorable environmental conditions for human activities and industrial operations. Significant operational, technological, and economic benefits might result if a lunar base was constructed inside a lava tube.
Habitats set up in lava tubes have many advantages, including radiation protection and a benign thermal environment. In practice, the pressurized habitat would be placed in the cave, and access roads would be built to go to and from the facility. In some cases, it may even be possible to seal the cave walls with some type of material (e.g., plastic) and then pressurize the entire interior volume. This approach would provide significant amounts of space for many residents and would only be employed in advanced lunar habitation stages.
Habitat for Humanity?
For decades, researchers have speculated that lava tubes on the Moon and elsewhere could offer prime space for setting up living quarters for colonists. The tubes are appealing for many reasons. First, the environment is protected from radiation such as cosmic rays, solar energetic particles, and ultraviolet light. Second, the rock roof would be a shield against micrometeorites that could otherwise puncture spacesuits and buildings. And as on Earth, the underground environment would be buffered from temperature swings. On the Moon, those variations are extreme. Data gathered by the Lunar Reconnaissance Orbiter between 2009 and 2013 reveal that temperatures near the lunar equator can reach 248 Fahrenheit (120 degrees Celsius) in the daytime and plunge to –202 Fahrenheit (94 degrees Celsius) during the two-week-long night. Whether colonists could take advantage of those benefits is another question. Considering the likely instability of material around the edges of skylights, as well as the limited mobility of existing spacesuits, it would be a big challenge to lower people into a hole in the ground and then get them back out.
The interiors of lava tubes provide a relatively constant-temperature environment, estimated at -4 Fahrenheit (-20 degrees Celsius), shielded from radiation. The interior is also relatively dust-free. Recently observed lava tubes have large volumes, perhaps too large for early settlements. Depending on their orientation and angle of incidence with the surface, they can be challenging to enter.
Then there’s another opinion about lava tubes and caves, whether they are safe or not. Despite the idea of making a home in these features, some scientists argue about the caves, that they’re dangerous. That’s especially likely to be true near skylights, where the roof has already demonstrated the propensity to collapse. Human activity could well destabilize them even further or cause avalanches of material around the edges of the skylights. Lava tubes may be exciting to explore but not that safe to live in. The engineering challenges of placing inflatable habitats within such impressive caves are not trivial and require very detailed studies.
How are Lava Tubes Formed?
Lava tubes are formed by flowing lava. As the outside of the flowing lava cools and hardens, it creates a liquid lava flow tube. That lava can drain out of the tube, leaving a hollow structure that can travel a long way and be very voluminous.
Lava tubes can form almost anywhere molten rock streams from the ground. Steady flows of low-viscosity lava are the most likely to form lava tubes. They can form in a way akin to how rivers ice over during a cold spell. As flowing lava loses heat to the overlying air, its surface cools and solidifies — but it does so more quickly at the edges of the flow, where material moves slowly. Eventually, the molten flow freezes over from shore to shore, which insulates the underlying lava by robbing it of the ability to radiate heat upward or be cooled by winds directly. Then, when the source of lava begins to wane or as the molten flow chews or melts its way into the underlying rocks, or both, lava drains from the conduit and leaves behind a smooth-sided, steep-walled cavern. Lava flows can melt their way into underlying rocks. According to Alan Whittington, a geologist at the University of Texas-San Antonio, if the flow is fast and turbulent, lava can erode downward as much as 1 meter each day. So the tubes created by voluminous and long-lived flows can be huge.
Lunar Lava Tube Structure and Characteristics
Lunar lava tubes may vary significantly in width and overburden (also called waste or spoil, is the material that lies above the surface). Although some lava tubes could be as much as 5000m wide with overburdens of 500m, observations of skylights (observable openings) suggest that many lava tubes have overburdened, ranging from 1-20m, and would be able to support widths of up to 750m. Lava tubes are believed to have some variation of basalts, such as KREEP basalt (referring to high concentrations of potassium (K), rare earth elements (REE), phosphorus (P)) lunar granite, or as a mix between the two. Such mixtures are also likely to have higher concentrations of thorium and uranium. Other rocks such as lunar granites could also form the area that surrounds and makes up the lunar lava tubes. Lunar granites, like terrestrial granites, have high Silicon dioxide contents, typically around 70%. Lunar granites also generally have lower Aluminium oxide (approximately 12%) and Iron Oxide (typically 6% less than basalt) components than KREEP basalts. The other possible scenario in terms of composition could be some mixture of granite and basalt.
Lunar Caves Exploration for Research Purposes
Apollo astronauts, as part of their rock- and soil collecting activities on the lunar surface never drilled more than 2.9 meters into the surface. In contrast, the walls of lunar skylights can measure tens of meters thick and show distinct layers. Some of those layers may be ancient lava flows that could be dated to indicate when and how often volcanic activity occurred. Sandwiched between those strata may be layers of regolith, or pulverized rock, formed by the incessant pounding of meteorite impacts. The thickness of such layers may help researchers estimate the rates at which such impacts occurred in the past. The rates and timing of such effects would be roughly the same as those Earth experienced, so they may shed light on the planet’s environment as life emerged — and whether it was snuffed out before emerging again.
Moreover, detailed chemical analyses of those materials may reveal past variations in the solar wind, whose charged particles become trapped in the regolith. Tracing the history of the solar wind could also shed light on variations in Earth’s ancient climate. For one thing, a more active sun may have emitted more planet-warming radiation along with torrents of charged particles
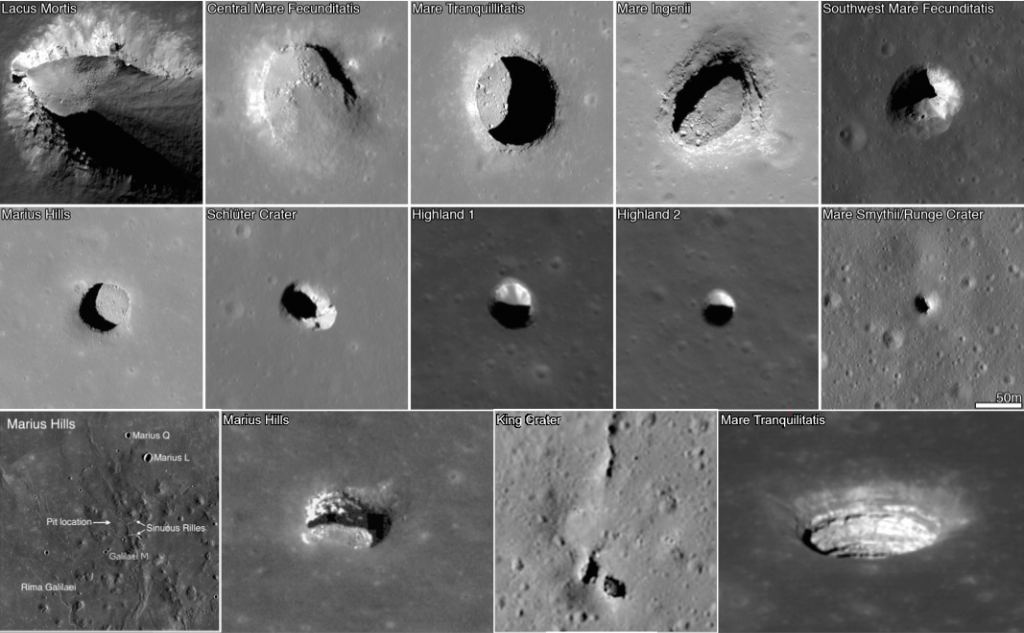
Major Lunar Pits
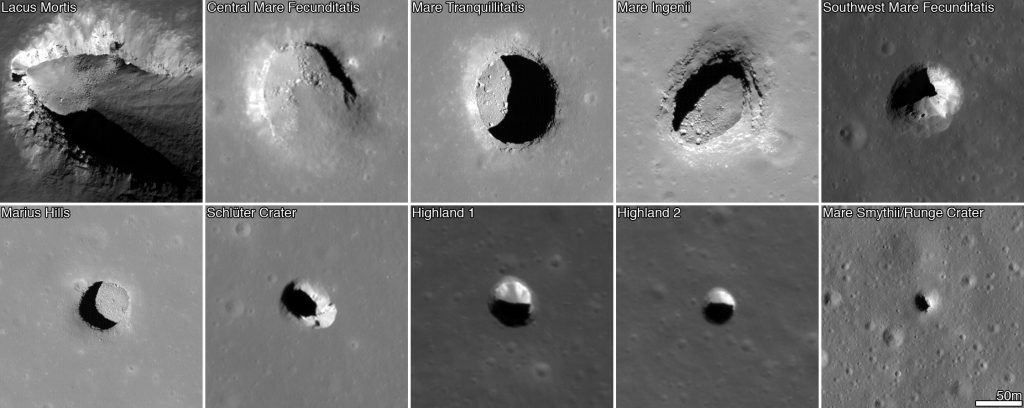
Impact craters are visible everywhere on the Moon, but pits are rare. There are three reasonably well-documented pits on the Moon: the Marius Hills Pit in the Oceanus Procellarum, the Mare Ingenii Pit, and the Mare Tranquillitatis Pit. The terms pit, hole, and skylight are related. What looks to be a black hole is often called just that, but it seems like a pit from a distance. If you can see into the hole, it is sometimes called a skylight. The terms all imply an interior cave that is a collapsed lava tube.
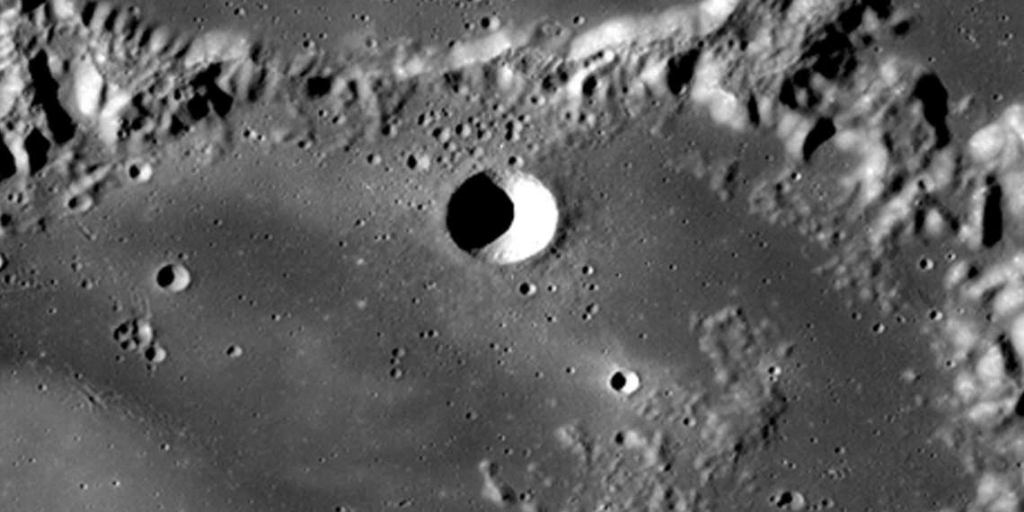
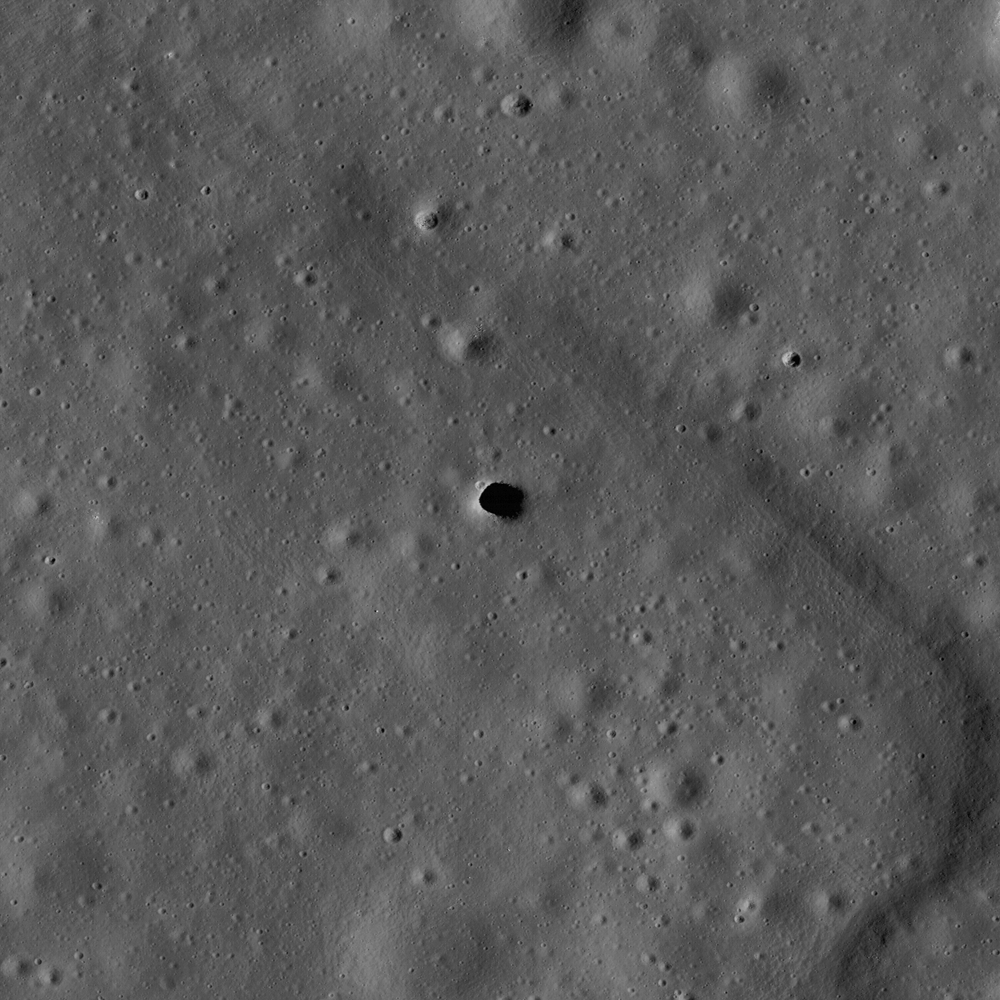
Marius Hills Pit
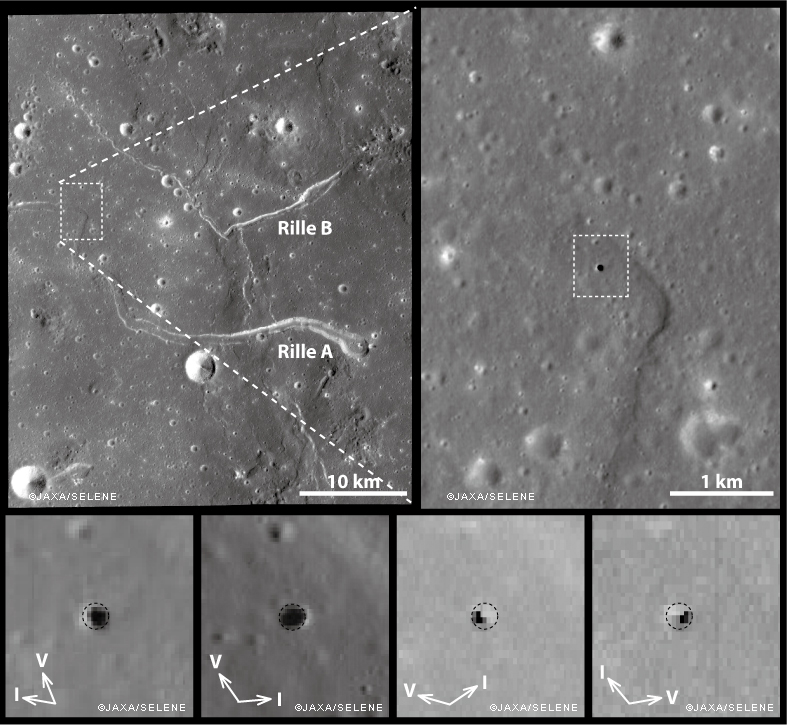
This pit is at approximately 14.09°N, 303.31°E,1 in the Marius Hills region that was once volcanically active and had many surface expressions, including sinuous rilles, which are long meandering fractures or channel-like features. Lunar sinuous rilles are enigmatic features interpreted to have formed as the result of lava erosion into the lunar surface. Sinuous rilles are commonly characterized by channels of varying depths and widths with parallel-striking, laterally continuous walls. These features are often observed with associated depressions of various morphologies that represent potential source vents, and the channels typically terminate in mare regions, either gradually fading into the mare or abruptly truncating at contact with a younger, embaying mare unit.
Before the Apollo missions, some scientists thought sinuous rilles were formed by running water on the surface but disputed. Today, we know they are volcanic structures that were formed either as open lava channels and as lava tubes that subsequently collapsed. Because the Marius Hills Pit is associated with a rille, it probably represents a collapse in a lava tube roof. It is possible the pit was produced when an impact punched through the top of the lava tube. A 1985 report by Friedrich Horz of the Lunar and Planetary Science Institute at the Johnson Space Center in Houston, Texas, pointed out that lava tubes might be useful for lunar bases.
The Marius Hills Pit was revealed by the JAXA/SELENE Terrain Camera and later imaged by the Lunar Reconnaissance Orbiter. The maximum and minimum pit diameters are 57 m (187 ft) and 48 m (157 ft), respectively, and the full depth of the floor of the pit below the surrounding terrain is 45 m (147 ft).
Credit: NASA/GSFC/Arizona State University
Credit: NASA/GSFC/Arizona State University.
Credit: JAXA/SELENE
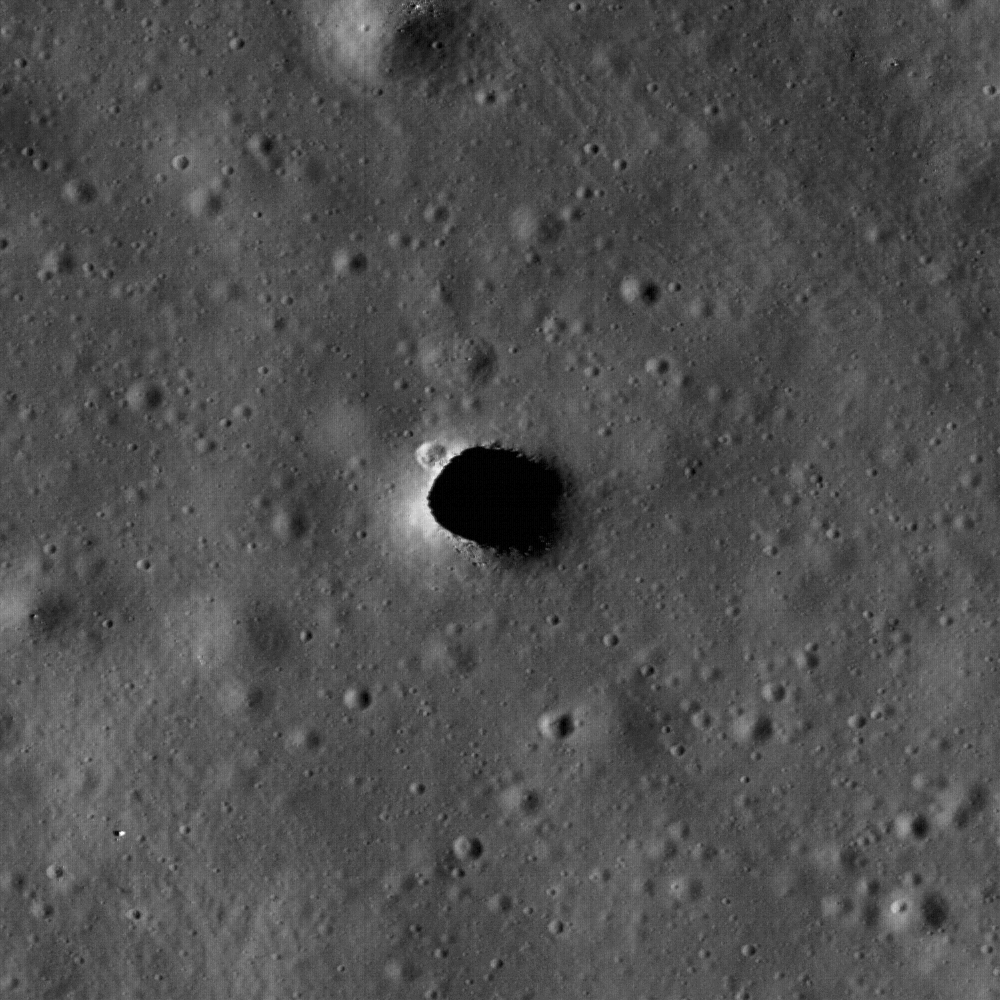
Mare Tranquillitatis (The Sea of Tranquility)
On July 20, 1969, Neil Armstrong and Buzz Aldrin left the first human footprints on the Moon near the southwestern shore of Mare Tranquillitatis, a dark sea of approximately 873 km (543 mi) in diameter with its center at about 0.68 N, 23.43 E. The “basin” that includes the peripheral mountain ranges is believed to have been excavated by a huge impact in the Moon’s early history, at least 3.9 billion years ago. Sometime later, magma welled up through the deeply fractured floor of the crater to fill the cavity with vast amounts of low-viscosity basalt that produced a relatively flat plain – as recently established by the Lunar Orbiter Laser Altimeter (LOLA).
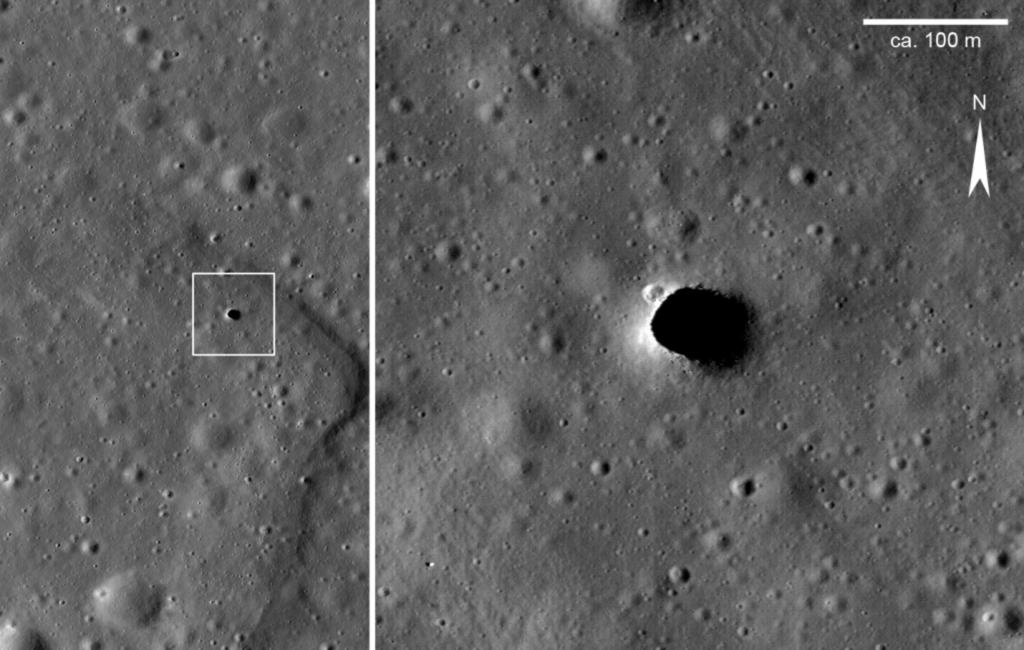
At 8.34°N, 33.22°E is a big pothole called the Mare Tranquillitatis Pit. This is about 85–97 m (300 ft) across and 100 m (328 ft) deep. Equivalent to a football field across and over 30 stories deep, it is more than a cave; it is a cavern. In the low gravity of the Moon, such structures might be much larger than those on Earth or Mars. The data that we obtain on this vast cavern’s structure and material might be useful in learning how to use satellites to investigate cavities with a degree of accuracy that might later be applied to smaller holes that would be better suited to human occupation. Because the fractures and pits found in impact melts are smaller and more frequently occurring than mare pits, they are likely to be more easily accessible than mare pits and thus preferable for exploration. Because of their small sizes relative to the local equilibrium crater diameters, the mare pits are likely to be post-flow features rather than volcanic skylights.
The Lunar Reconnaissance Orbiter mission was inserted into orbit around the Moon in 2009 to perform a surface survey with modern sensors. The Lunar Reconnaissance Orbiter Camera (LROC), operated by Arizona State University, combined two narrow-angle cameras (NAC) and one wide-angle camera (WAC). Over a mission lasting ten years, the spacecraft is expected to return more than 70 terabytes of imaging data.
When the Sun is directly overhead, the floor of the Mare Tranquillitatis Pit is illuminated. With an incidence angle of 26.5° and a shadow of 55 m (180 ft), the depth has been estimated at slightly more than 100 m (328 ft), measure from the edge of the shadow, which begins somewhat downslope from the gradual margin. When measured against the surrounding plain, the depth is even greater. Compare this depth to the width, ranging from 100–115 m (328–377 ft), spanning the sharp precipice.
Source: NASA/GSFC/Arizona State University
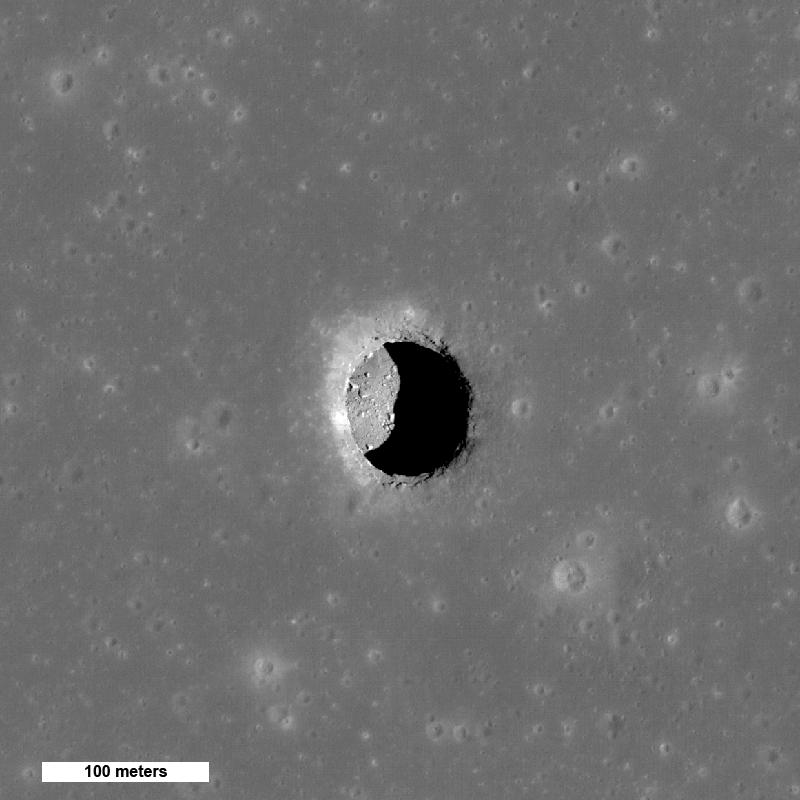
Mare Ingenii (The Sea of Cleverness)
Located at 35.95°S, 166.06°E, Mare Ingenii is one of only a few mare features on the far side of the Moon. The mare sits in the Ingenii basin. This basin material is of the Pre-Nectarian epoch that spans from the Moon’s creation by process of accretion some 4.5 billion years ago to about 3.9 billion years ago. The mare in Ingenii and the surrounding craters are in the Upper Imbrian epoch, which dates to about 3.8 billion years back. The dark circular feature which dominates the view is the crater Thomson, 112 km (70 mi) in diameter. The lava sheets of Mare Ingenii are thin and only partially cover the expanse. There are swirling patterns of bright material that are not associated with either topographic or volcanic features. This mare contains the second instance of a lunar pit on the Moon.
NAC M128202846LE
Credit: NASA/GSFC/Arizona State University
Preparing Astronauts for the Journey
Astronauts preparing to explore such caves would need training in traversing vertically developed environments and cave exploration. These expeditions would also require preparation for the challenges of exploring a natural environment with uneven terrain, sharp rocks, rock falls, and other unpredictable hazards.
This would involve training for normal exploration operations and emergencies as well. Some of this is already being studied, and astronauts are training through the European Space Agency’s CAVES and PANGAEA programs. Since 2012, these programs have trained astronauts on exploring underground caves and understanding planetary geology, including lava tubes on Lanzarote, one of the Canary Islands.
It is for sure a big challenge, but it is now clear for all space agencies that while we have already a good knowledge of the surface of the Moon, one of the main steps forward for space exploration would be to demonstrate the capability of exploring the subsurface of a planetary body. The call for ideas from universities and the space industry is seeking new technologies that could be developed to land on the Moon and explore lunar caves. Next, we want to learn more about these tubes, including creating 3D laser scans and understanding their chemistry.
When we have a figure of their subsurface development through remote sensing, we will provide the most promising targets for future space robotic or human missions to start the exploration of these features.
Astronauts Underwater Training
Training astronauts underwater is an effective way of getting used to the sensations of working in weightlessness for long periods. The underwater world offers similar geological features to the Moon and putting ideas to the test under high workload, real-world stress, and the unexpected problems that come with fieldwork is one of the only ways to iron out any kinks in new exploration approaches and techniques.
Many such pieces of training are conducted to assess concepts for undersea training that will aid the Moon exploration missions. NASA Extreme Environment Mission Operations (NEEMO) is an example of such training.
Long Duration Space Missions for Planetary Surface Exploration
Space agencies are concerned with the training of their astronauts for long-duration missions, not only for current and future orbital missions but also for future human and robotic planetary surface exploration. Preparing for expeditions to other planets requires a realistic replication of environmental and situational characteristics of the extreme conditions of space in Earth analog platforms, where stressors similar to those encountered in long-duration spaceflight are provided. The environments in which such training events are carried out must have realistic perceived risk and must enable complex technical tasks and require group living in isolated and confined settings. This involves identifying suitable terrestrial analog environments and the design of high-fidelity training courses/mission scenarios with a representative operational setup. Since 2008 the European Space Agency has started investigating the use of scientific expeditions into caves as a novel platform for astronaut training, taking advantage of the cave environment’s natural analogies and associated technical operations with space missions. In 2011 a new ESA training program named CAVES (Cooperative Adventure for Valuing and Exercising human behavior and performance Skills) was launched, with the specific goal to prepare astronauts for long-duration space missions.
The Japan Aerospace Exploration Agency (JAXA) also believes lava tubes might be the best candidate sites for future lunar bases, because of their stable thermal conditions and potential to protect people and instruments from micrometeorites and cosmic ray radiation. Careful examination of their interiors could provide unique insights concerning the evolutionary history of the Moon.
The agency says about the lunar caves that could be used as a base for astronauts and their equipment and is planning to explore the caves by sending astronauts. JAXA recently announced that it aims to put a Japanese astronaut on the Moon for the first time by around 2030, most likely as part of an international mission.
On September 24, 2019, Dr. Hiroshi Yamakawa, President of the Japan Aerospace Exploration Agency (JAXA), and Mr. Jim Bridenstine, Administrator of the National Aeronautics and Space Administration (NASA), met to discuss future bilateral cooperation in lunar exploration.
Since around 2016, NASA launched the TubeX Project, which aims to develop an exploration strategy for lava tubes or tunnels created by flowing lava. Teams are working on the project to practice checking out terrestrial lava tubes to better prepare for exploration.
The TubeX principal investigator Kesley Young says that exploring lunar lava tubes without any knowledge in advance would be risky — hence practicing here on Earth to develop techniques that could allow astronauts to map those tubes from above the surface.
That’s where a suite of carefully selected science instruments comes into play. The team spent about a week at lava beds, their second visit to the project. They tested three types of portable technologies, evaluating whether they might allow future explorers to map lava tubes from the surface so they know what they’re getting into in advance. Those portable instruments included a ground-penetrating radar, a magnetometer, and a gravimeter.
Psychological Training of Astronauts for Lunar Caves Explorations
Behavioral issues for isolated, confined teams in future planetary missions are among the least known factors with a very high potential impact on the mission’s success. From a psychological and psychosocial perspective, much of the spaceflight stressors are present in cave exploration. When inside a cave, days of progression far from the entrance, the isolation is complete. Cave environments are confined, but mainly mobility is constrained, for safety reasons, to specific paths along walls. Communication with the surface is minimal and relies only on technologies that are not trustworthy. This sense of isolation is directly correlated with the distance from the entrance, given the awareness that every hour of progression would most probably require one full day for a rescue team to get back to the surface of an injured or incapacitated person. Some stress elements are directly related to the cave environment’s rough nature and to the difficulty of creating comfortable habitability settings at the base camp. That is translated into a lack of privacy, uncomfortable sleeping, limited hygiene, exposure to cold and humidity, dust and mud, etc. All these stressors, if not managed, in the long term, induce irritation, social conflicts within the team, altered decision-making, or even physiological discomfort and health issues. Different cultural approaches to leadership, information sharing, decision-making, and teamwork are employed during current ISS missions while respecting established hierarchies, rules, and procedures.
Based on a short-term plan, the prototype of a lunar surface communication system of the lunar research station could be several centralized wireless networks, which is similar to the terrestrial cellular networks. The lunar cave environment resembles the mining operations carried on earth. This 802.11p has been implemented for mining operations and its noted that it has an outstanding communication range and it can determine its location precisely, even deep underground.
ESA’s CAVES Concept and Training Structure
Caves are hostile and dangerous environments that shall be dealt with clear operational safety rules, requiring the mastering of technical progression skills. The environment is, however, just a container: analogies should be based on similarities in experiences, not only in the environment. During the ESA’s CAVES course, astronauts are trained to use single rope ascension tools and techniques to negotiate obstacles and long traverses rigged with iron cables. This technical training resembles skills and safety protocols required to move and operate in extravehicular activity, with a reduced field of view, shadows, tri-dimensional progression through viable paths, confused perception of obstacles and distances, keep-out and no-touch zones.
This preparatory training is introductory to an extended cave exploration phase, where the astronauts autonomously perform a scientific expedition as a multicultural and multidisciplinary team. Astronauts are trained to use a buddy system and to maintain team situational awareness through briefings and debriefings in order to maintain control on the safety of the whole group, to allow informed decision making for each member of the team, and to enable team learning through analysis of failures and successes. Analog team training needs to be based on the concept of operations and provide real challenges, stressors, and a credible program. Astronauts should explore new branches of the cave and are required to survey all newly explored areas and provide photographic documentation of all activities performed.
Technologies Enabling Exploration of Lava Tubes and Caves
Recently there have been ongoing research, multidisciplinary studies, and projects involving exploration of the Moon and Mars, involving caves as shelters. Some of the general but critical technologies that provide the basis for a broad set of human exploration capabilities are discussed below. It is an extensive area with multiple dimension; some relate to getting a team of astronauts to the desired site, and some relate to assisting them once they are there, specifically: exploring the area, locating the desired cave, assessing its suitability, deploying robots, rovers and base camp equipment, deploying inflatables, setting up communications, using imaging scanners and other instruments, and settling in for the long haul.
Robotics
Human exploration of the Moon and Mars will definitely use different kinds of robots. When using the word robot, one means a reasonably sophisticated artificial intelligence (AI) software algorithm that controls hardware. When you conceive of missions that explore caves and lava tubes and a wide variety of terrains on the Moon, you visualize a multitude of robots, each designed to perform given types of tasks. Some robots may operate autonomously, others will respond to their human handlers, and some will be able to think for themselves; it’s humans and robots working together as a team.
While the robotic exploration of skylights and caves can seek out life, investigate geology and origins, and open the subsurface of other worlds to humankind, it is a daunting venture. Planetary voids present perilous terrain that requires innovative technologies for access, exploration, and modeling. The robots that venture into caves must leap, fly, or rappel into voids, traverse rubble, navigate safely in the dark, self-power, and explore autonomously with little or no communication to Earth. Exploiting these features necessitates a leap of technology from current planetary missions, which land with large error ellipses in statistically safe terrain, rove slowly and cautiously across the surface, depending on the Sun for power and light, and rely on constant human oversight and control.
Over the last few decades, numerous missions started with flyby spacecraft, followed by orbiting satellites and missions with orbiter/lander capabilities. Since then, there have been numerous missions that have utilized rovers of ever-increasing size and complexity, equipped with state-of-the-art laboratories on wheels. Although current generations of rovers achieve mobility through wheels, there are fundamental limitations that prevent these rovers from accessing rugged environments, cliffs, canyons, and caves. These rugged environments are often the first places geologists look to observe stratification from geohistorical processes. There is an important need for new robot mobility solutions, like hopping, rolling, crawling, walking, and hovering that can access these rugged environments like cliffs, canyons, and caves. These new generations of robots have some extraordinary capabilities including being able to grip onto rocks like NASA/JPL LEMUR 2, operate in swarms such as MIT’s microbots, or have high-specific energy fuel cell power supply that is approximately 40-fold higher than conventional lithium-ion batteries to Stanford/NASA JPL’s Hedgehog which is able to hop and somersault in low-gravity environments such asteroids. All of these mobility options and supporting technologies have been proposed and developed to explore these hard-to-reach unconventional environments.
Communication in the Cave Environment
Once inside the lunar cave, it is necessary to keep the communication with the surface and finally with Earth. This focus here is on how to bring the data to the lunar surface (Moon-Earth segment excluded) from a subsurface environment, including scientific and mapping data. Another problem to be addressed is the power network since, in the cave environment, there is no possibility to directly access solar energy for battery recharge.
As discussed, lava tubes are thought to be one of the special interests in science objectives and human habitability. The communications environment in such a cave is essential for exploration. The electromagnetic properties of the cave environment and how to plan a communications network, focusing on identifying communications hazards and their workarounds, are required to be explored. The waveform selection and optimizations for a power-constrained environment are also significant.
There are various reasons that the wireless signal will face high scattering in the cave environment, by the obstructers and the cave walls. The 802.11 OFDM waveform is specifically designed to deal with frequency-selective fading environments. Orthogonal Frequency Division Multiplexing is a form of signal modulation that divides a high data rate modulating stream placing them onto many slowly modulated narrowband close-spaced subcarriers, and in this way is less sensitive to frequency selective fading. One of the main advantages of OFDM is that is more resistant to frequency selective fading because it divides the overall channel into multiple narrowband signals that are affected individually as flat fading sub-channels. OFDM is known for its robustness against multipath fading.
The biggest time delay spread appeared to be 250 ns (70 meter path difference) without any evidence of a wider spread. This is significantly smaller than the 802.11 OFDM symbol period of ~3 μs. For this reason, WiFi performance in the cave being modeled is estimated based on signal to noise rather than having to consider the inclusion of residual interference effects of highly delayed signal energy.
The fading caused is mainly because of the following factors:
- fading margin within any cross-section of the cave due to the concentration of signal power in strong reflections,
- signal energy flux loss due to the obstacle,
- the reduced signal level in shadowed regions,
- Attenuation by lossy cave walls, and
- fading as a result of backscatter.
Each of the quantities can be assessed based on the specific cave encountered.
Lava tubes do exhibit rough surfaces, and according to research, a simulation with surface variations up to 10 cm suggested an attenuation closer to 0.2dB/m. If exploration includes side passages, transmit power can be increased since the regulatory requirement would not apply. However, if the option is available, a mission capable of placing a relay is a more reliable approach. Finally, it is noted that signal processing power, not transmit power, may be a limiting factor in a power-constrained environment, especially if older technology is deployed to counter the space environment. A much simpler waveform, where WiFi coding and OFDM processing can be traded off for higher transmit power, is possible. A simplified 802.11 waveform may be deployed along with the full waveform, and the simplified waveform could be used when mobility allows the exploration vehicle to move to locations of greater signal concentration.
Antenna Selection for Wireless Communication
Antenna selection is one of the key factors in system performance. A trade-off must be made based on the antenna radiation pattern and how the antenna affects the robot’s structure. A quad monopole antenna or a dipole antenna could be considered. This has an omnidirectional radiation pattern and will maximize the range of the system in all directions and thus more efficient. The communication system in a cave environment is susceptible to multipath and interference, including inter-symbol interference. Hence, an OFDM system with long guard bands is a good implementation to reduce the effect of high multipath. To reduce inter-symbol interference, an equalizer is used. To set up a communication network, individual robots must be identifiable. For this, OFDMA is considered. OFDMA (Orthogonal frequency-division multiple access) is a multi-user version of the OFDM digital modulation scheme. Multiple access is achieved in OFDMA by assigning subsets of subcarriers to individual users. After this is done, a multi-hop communication network must be set up to create a mesh network of robots. Researchers from the University of Arizona, Arizona State University, and Jet Propulsion Laboratory, California Institute of Technology claim that OFDM is the most appropriate for communications on the lunar surface because of the environmental conditions.
Path Planning and Navigation Inside Lava Tubes and Caves
While exploring the cavity, it is necessary, both for navigation and scientific purposes, to keep track of the surrounding environment through high-precision mapping. The lack of geo-referencing systems represents a high challenge that can be overcome only with real-time mapping through technologies like laser scanners, photogrammetry, inertial systems, and others. Innovative solutions are necessary, including multi-robot systems or integration between surface and subsurface instruments.
Mobile ground robots have become integral for surface exploration of the Moon, Mars, and other planetary bodies. These rovers have proven their merit, but they are large, often in the order of several hundred kilograms, and house state-of-the-art science laboratories. Exploring these pits using wheeled ground robots will prove to be a daunting challenge. Many pits from LRO images show evidence of collapsed entrances due to past geologic activity. On Earth, many lava tubes have collapsed entrances that are extremely rugged and are only accessible by some of the fittest hikers. In addition, conventional methods of path-planning and navigation used by planetary rovers are not applicable in these pits as they are sheltered by thick rock, which blocks sunlight and prevents radio communication with the outside world. Exploring these pits requires a whole new mobility platform and specialized methods for path planning and navigation.
To explore a cave or lava tube requires a team of robots that work cooperatively to map, navigate, and communicate the data back to a base station located outside the lava tube. Added to the challenge, the robots also need to perform localization in the dark. A lack of line-of-sight communication and interference from the thick rock requires the robots to operate in bucket brigades, as they relay messages from the base station to individual robots. Using this approach, the SphereX robots install small mirrors along the lava tube’s length, much like a trail of breadcrumbs. This trail of mirrors would simplify localization and enable the robots to easily travel to the lava-tube entrance or the tube end. The mirrors would be used to beam sunlight along with the network of mirrors, providing lighting. An additional laser beam would be reflected using these mirrors to beam power and provide a fixed communication line.
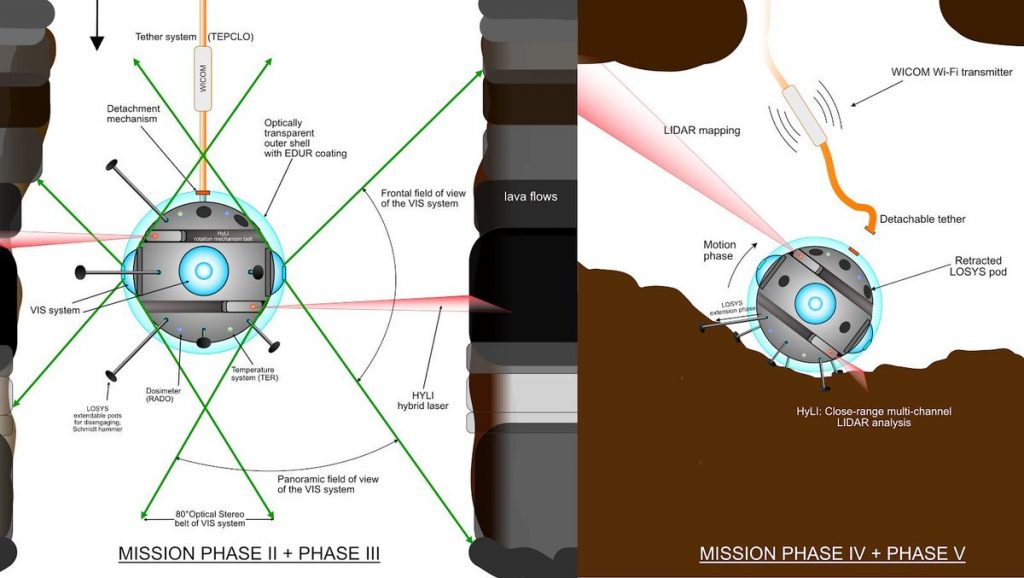
Some other examples of robots for lunar cave missions are DAEDALUS, PitRanger, and A-PUFFER. Designed by a team coordinated by Germany’s Julius-Maximilians-Universität of Würzburg (JMU), the Descent And Exploration in Deep Autonomy of Lunar Underground Structures, DAEDALUS robot is being evaluated by ESA’s Concurrent Design Facility, as part of a larger study of lunar cave mission concepts. The 46-cm diameter DAEDALUS sphere would carry an immersive stereoscopic camera, a ‘laser radar’ lidar system for 3D mapping of cave interiors, temperature sensors, and a radiation dosimeter, as well as extendible arms to help clear obstacles and test rock properties.
DAEDALUS would first be lowered into the cave mouth on a long tether, then disconnect to roll away autonomously under its own power. The hanging tether would then double as a Wi-Fi receiver, allowing DAEDALUS to relay its findings out of the pit.
PitRanger (formerly called MoonRanger) is currently on track to become the key instrument in a short-term moon mission aimed at capturing high-definition 3D images of lunar pits. These deep, steep-walled holes are thought to have been shaped billions of years ago by a once-geologically-active moon. Funded by the NASA Innovative Advanced Concepts Program (NIAC), the mini-robot will weigh 33 pounds (15 kg) and be solar-powered.

Credit: William Whittaker/Carnegie Mellon/PitRanger Team
The decision to use solar power, in particular, poses challenges, alongside advantages, in a world whose day and night last about two earthly weeks. PitRanger is also different from previous moon exploration missions because of its autonomy. The PitRanger robot rover is designed with the strategic decision-making and imaging capabilities required to navigate risky ledges around a pit. Autonomy for quick missions like this one is becoming a necessary technology, these scientists say since supervision and guidance from controllers on the ground won’t be available to small, solar-powered rovers like PitRanger.

Image via William Whittaker/ USRA/ Carnegie Mellon University.
NASA JPL developed the Autonomous Pop-Up Flat Folding Explorer Robot (A-PUFFER) to scout regions on the Moon and gain intel about locations that may be difficult for astronauts to investigate on foot, like hard-to-reach craters and narrow caves. A “pop-up” robot that folds into a small, smartphone-sized weight and volume can be packed into a larger parent craft at a low payload cost, then deployed on a planet’s surface individually to increase surface mobility. This new iteration of A-PUFFER includes several modifications to the previous design. In addition to larger wheels, each robot has an upgraded onboard computer with a wireless radio for communication and a ZED stereo camera for sensing the environment in front of it.
NASA JPL scientists presented a mission concept Moon Diver with an extreme-terrain rover called Axel, designed to rappel hundreds of feet down into large pits on the Moon’s surface. During descent, science instruments in the rover’s wheel wells would unfold and study the ancient moon by way of its exposed stratigraphy — the layers of rock hidden below the surface. Axel would carry multiple instrument payloads to survey a lunar cavern, including a stereo pair of cameras for close imaging of the walls and a long-distance camera to look across at the opposite side of the pit. A multispectral microscope, i.e. operating in several regions of the electromagnetic spectrum, would detail the mineralogy of the cavern, while an alpha particle X-ray spectrometer (APXS) would study the elemental chemistry of the rock features.
If approved by NASA, Moon Diver would descend into one of the enormous pits dotting the surface of the Moon. The walls of the cave under consideration for the spelunking spacecraft are about 130 feet (39.6 m) deep, followed by another 200 feet (61 m) of freefall into a deep, dark, mysterious maw beneath the lunar surface.

Credit: NASA / JPL-Caltech
Power Storage and Generation for Lava Tubes and Caves Missions
One of the biggest challenges of the exploration of the Moon is the survival of the crew and the lunar assets during the lunar night. The environmental conditions on the lunar surface and its cycle, with long periods of darkness, make any long mission in need of specific amounts of heat and electricity to be successful. A thorough analysis of all possible solutions to produce heat and electricity on the Moon’s surface is required.
Several approaches have recently been considered to store and provide energy on the surface of the Moon through ISRU (In-Situ Resource Utilisation). Technologies potentially suitable for system components have been identified. These technologies are related to solar energy collection, heat transport, heat storage, heat-to-electricity conversion, and heat rejection. There is a need to conduct a trade-off analysis that provides a selection of the most suitable technologies to use in an ISRU-based heat storage and electricity generation system.
Electronics
A key challenge of high-performance computing in space is radiation, which can cause errors in digital electronics and software. The conventional solution is to design systems that are “hardened” to this radiation, but such customized and low volume production is expensive and can introduce significant development delays. A company called Astrobotic intends to address this issue by moving the “hardening” into the software with efficient distributed consensus algorithms to carry out flexible error detection and correction using off-the-shelf processors with minimal overhead.
Safety Concerns
Staying underground may be the most effective protection against radiation, and camping out in lava tubes would be much easier than creating new spaces under the surface. But exploring them without any knowledge in advance would be risky — hence practicing here on Earth to develop techniques that could allow astronauts to map those tubes from above the surface.
When it comes to using a cave as a habitat, there are some risks and hazards. The skylight could be huge, and too dangerous to approach without tethers that are anchored to the exploration vehicle. A form of smart robot would be required to penetrate the cave and transmit the data back to the astronauts and Mission Control for an assessment. Even if the cave seemed acceptable, in this situation the mission would need the infrastructure to lower the habitat and all of the associated equipment down into the cavity. This may be too great a challenge for the first mission.
Credit: NASA/LRO
It is already clear that some of the skylights observed on the Moon and Mars are really giant caverns that may well be too dangerous for humans to enter, and therefore are not suitable for habitation. Permanent darkness needs for artificial illumination. Sensory alteration/deprivation, not only are caves lightless, they offer almost no auditory or olfactory stimuli. The transportation logistics inside the cave are extremely complex, only limited supplies can be carried inside. Even with all reasonable safety measures, a cave is still a dangerous environment, presenting risks of falling, slipping, rocks tumbling down, being blocked by landslides and floods. It is necessary to pay constant attention to these aspects. Given the complexity of the environment, both evacuation and rescue operations will require several hours (or even days) to plan and execute. Robots must precede humans since the promise of caves is tempered by their great unknown. Safety and viability must be insured before humans explore and utilize these enchanting, invaluable destinations.
Optimal Cave
It is evident that the first cave must meet the safety considerations in terms of roof stability, radiation shielding, micrometeoroid protection, relative temperature stability. It must be large enough to accommodate specially prepared habitats, e.g. inflatable habitat equipped with airlocks, and in time, several inflatables will be added to serve different purposes.
Caves and tubes provide protection from micrometeoroid impacts, solar radiation, and thermal extremes. Robotic pit exploration methods should characterize these subsurface environments to inform the destinations and technologies developed for future human missions. This characterization will include the presence and size of subsurface voids, their entry geometry, and their structural integrity.
Conclusion
As we plan to go to the Moon, and maybe beyond, we will face all the problems of having no air and water, temperature extremes, and deadly radiations. We will need habitat for protection from the toxic environment, for which the lunar caves are the best option. Finding a suitable underground place for habitation will require considerable effort. The low gravities of the Moon may enable some of the lava tubes and caves to be huge. For those early missions, we would want the optimum cave. The cave research effort will go on for a very long time before actual exploration gets underway on the Moon. Satellite imagery has already shown many potential openings on the lunar surface, called ‘skylights.’ There are efforts underway to develop specific and unique technologies to work in these caves. The goal is to gather knowledge and investigate the general processes and conditions that establish and maintain habitable environments on the Moon.