

Technological improvements have made life easy in all aspects of life. One of the major advancements is robots, which have gained immense popularity. The robotic technology is deployed in many sectors and commercial fields and resulted in the overall enhancement of the processes. Robotic technology can be used in the space exploration sector for multiple roles. The cleanup or maintenance of the space stations are two examples where it can benefit. Another example can be the robotic systems providing information about unknown areas or where reachability is difficult. One of the incentives for developing remotely controlled robots in space exploration came from the need to minimize workers’ exposure to radiation and improve overall productivity.
Robots vs. Humans
It is difficult to compare human exploration with robotic exploration and judge the two missions on their particular outcome. However, robots certainly provide a large return for their investment in the space environment. Robots are very suitable for space environments because they can be specifically designed to fit the task and mission constraints. An adult has an average mass of around 70 kg, requires water and oxygen a day. The body needs to be held at a steady 37 C, and humans prefer a benign radiation environment. All of this is not readily available outside of the habitable zone on our planet. Robots have to struggle with the same kind of environmental hazards, but it is generally easier to make them fit.
Robots and Autonomous Systems for Space-based Applications
Robotics also plays a critical role in all space explorations, including moon mining. Robots are used in services like construction, maintenance, surveillance, exploration, etc., in space missions. Robotics are connected to multiple other technologies and emerging fields to contribute to space exploration and engineering. Robotics and remote handling technologies significantly improve human’s ability and help to cross the limitations. Two important attributes of robotics that are essential are locomotion and autonomy. A robot for space-based applications must be designed to have locomotion to manipulate grip, rove, and drill, etc. Its autonomy can make it a human proxy to conduct various tasks using teleoperations. These autonomous systems reduce the load from humans and execute the tasks more effectively and timely.
Remote Handling Technology for Space
Remote handling and robotics are some of the enabling technologies to improve performance; it will help in the advancement of maintenance techniques required. Maintenance and handling of tools for assembling and welding different parts or any repairing are carried out remotely. Part of the UKAEA is conducting R&D and commercial activities in the field of Robotics and Autonomous Systems (RAS). It also supports companies in developing their autonomous systems. The facility is a key center for implementing the Government’s Robotics & Autonomous Systems strategy, aiming to equip the UK to compete in this emerging global industry.
Robotics and remote handling are very useful for space missions. Robots that can withstand extreme environments are under production for such applications.
Is Human Supervision Still Required?
In space, it is difficult for humans to do repairs. Any damage caused can make a loss of both money and experimental time. Therefore, remote-controlled robots can be used in such situations. In remote handling, operators control robotic arms to carry out maintenance tasks that are difficult or impossible for humans to reach. Robotic technology can monitor the spaceships from outside and provide the researchers with images for inspection. It can be used to carry inspections and carry maintenance tools. Robots can provide the best possible visuals to know about the environmental conditions and any other monitoring
Currently, autonomous robots cannot function efficiently in many dynamic or variable environments, which require complete human control or teleoperation solutions. Robotic solutions are often found in environments with low human accessibility owing to physical constraints or danger. However, until significant progress is made with autonomous systems, robotic systems’ close human supervision will continue where environmental variability is high.
Automation Can Reduce Labor Cost
Automation technologies can help overcome these challenges and can help in the reduction of operational and maintenance costs. Automation technologies reduce labor activities, improve capacity, and ensure safety. Automation can assist in tasks like administrative, coordination, physical, and even analytical. Administrative tasks that do not include any cognitive operations and human intelligence like work-package archiving, review of checklist for safety, or assignment of resources that do not require balancing priorities. Physical tasks such as procedure execution, tag outs hanging, or equipment collection. Automation technologies can help a human perform these tasks or entirely replace the human element in others.
Some Major Applications of Robotics and Autonomous Systems in Space
Automation technology can help in location identification of resources and identification of objects and tools or identify particular pieces of materials and spatial locations. It can help in improved decision-making by providing key information about the work process. Automation technologies enhance the quality, speed, and safety of the activity they are applied to. These technologies have benefits beyond simply cutting costs because it will also allow for efficiency gains.
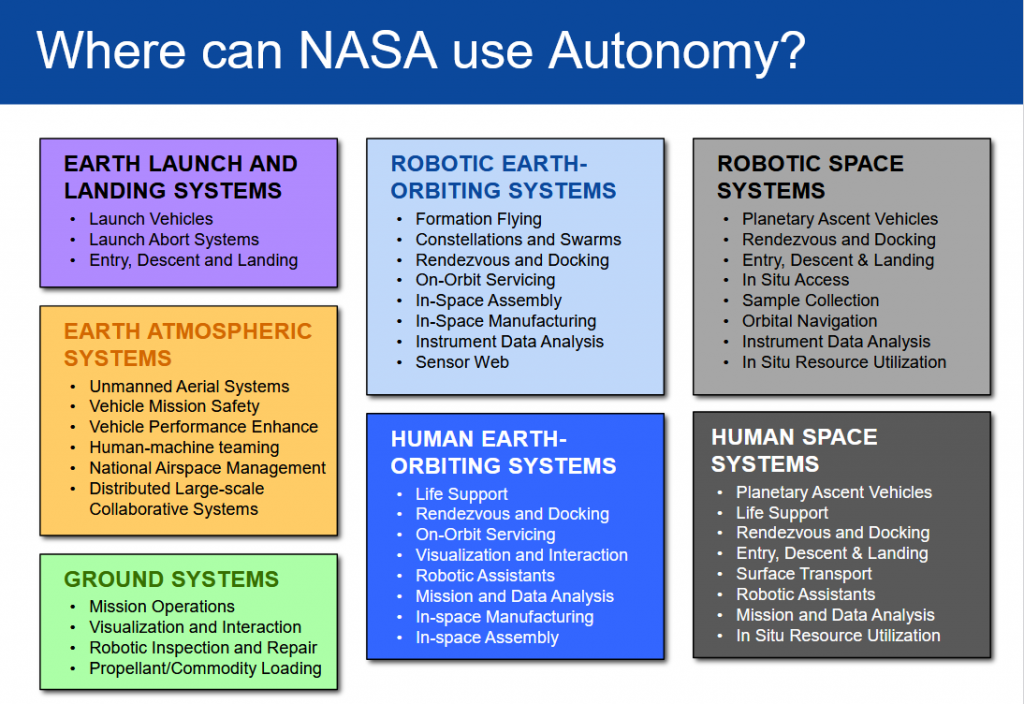
Some more applications of robotics and autonomous systems in space are given below:
- Sensing & perception: To provide situational awareness for robotic space agents, explorers, and assistants.
- Mobility: To reach and operate at sites of scientific interest on extra-terrestrial surfaces or free space environments.
- High-level autonomy for system and sub-systems: To provide robust and safe autonomous navigation, rendezvous and docking capabilities, and enable extended-duration operations without human interventions to improve human and robotic missions’ overall performance.
- Human-robot interaction: To enable humans to accurately and rapidly understand the state of the robot in collaboration and act effectively and efficiently towards the goal state.
- System engineering: To provide a framework for understanding and coordinate the complex interactions of robots and achieve the desired system requirements.
Terry Fong – Senior Scientist for Autonomous Systems
Space Technology Mission Directorate
Swarm Robotics for Space Exploration
Another exciting area for robotics in space exploration is Swarm Robotics. Swarm robotics is a field of multi-robotics in which a large number of robots are coordinated in a distributed and decentralized way. It is achieved and inspired by studying the rules and behavior of beings living and working in swarms such as social insects, fishes, or mammals. The group behavior can accomplish many difficult and arduous tasks with more efficacy than a single robot, giving robustness and flexibility to the group. Intelligent behavior can arise between individuals with poor abilities when they share local information. The same techniques and algorithms are being applied to autonomous robots to improve space exploration programs’ cost-effectiveness and efficiency. The accuracy and adaptability offered by swarms of tiny autonomous robots will give science a new way to chart and explore the vastness of space.
Advantages of swarm robotics are:
- To complete a complicated task, a single autonomous robot would have to be designed to hold all the necessary tools and computing power onboard, and the program would be too lengthy and difficult to write and understand. In place of a single, very powerful but at the same time costly and heavy robot, we can use a swarm of simple, less capable, autonomous robots to complete the same task. The low cost of construction and maintenance will be a boon. It would be very suitable for large scale tasks like space exploration.
- Multiple targets can be worked upon using swarm robots; the population size of a swarm is quite large. This is also known as parallelism. It could work in a vast environment-saving much crucial time.
- Stability and scalability are the best features of a swarm. It allows the swarm to add n- number of individuals to it without compromising the task at hand or the need to change the software/hardware. The swarm can adapt to the change in the population through implicit task re-allocating schemes without any external operation. These features are especially useful in unknown and potentially dangerous environments encountered during space explorations.
- The individual in the swarms are very light and simple and thus have a low cost compared to a single robot. As they are simple, they consume less power hence are very energy efficient
Near-Earth Missions & Deep Space Missions
Space activity can be considered in terms of either in-orbit activity near Earth or deep space missions including planetary exploration. Robotics and autonomy play a role in each.
Near-Earth Missions
The near-Earth region can be divided into the typical orbit regions occupied by satellites: Low Earth Orbit (LEO), extending from a few hundred km to two thousand km above the Earth’s surface; Geosynchronous Orbit (GEO), approximately 36000 Km above Earth where satellites orbit the Earth at the same rate that the Earth rotates beneath them; and Medium Earth Orbit (MEO), the region between LEO and GEO. Satellites in LEO are typically those performing remote sensing missions such as environmental monitoring, maritime observations, forestry and crop surveying, and more. The largest and most famous LEO satellite is the International Space Station. Satellites in MEO are typically those performing Global Navigation Satellite System functions (GPS, Galileo, etc.). Satellites in GEO are typically providing communications capabilities, including telephone, television, and internet or weather forecasting services. Space-science spacecraft are flown in a range of Earth orbits depending on the particular science objectives and implementation of the experiments and instrumentation.
Deep Space Missions
Deep space exploration missions began with the manned Apollo program, but to date have almost entirely consisted of unmanned spacecraft missions. These include space probes that have flown past all planets in the Solar System (and in the case of the Voyager 1 and New Horizons spacecraft, have flown beyond Pluto); space probes that have been placed into orbits around planets or moons of planets (for example, Mercury, Venus, Mars, Jupiter, Saturn, Titan); planetary landers on planets, moons, asteroids, and comets (for example, landers on Mars, Jupiter, Titan, as well as the Japanese landing on the asteroid Itokawa and ESA’s recent Rosetta comet landing); and the various robotic rovers currently active on the surface of Mars. Considerable effort is currently being expended by the US, Europe, China, and India, towards renewed manned deep space flight, and in particular towards manned missions to Mars and eventual colonization of Mars. In the shorter term, planetary rovers planned for the moon (China, India, Japan) and Mars (NASA and ESA) will continue to be developed and deployed.
History of Robotic Technology in Space Missions
The variety of robots used to perform space missions to date include the Soviet Union’s Lunokhod rovers teleoperated from Earth in the 1970s, the numerous NASA Space Shuttle flights that consistently operated Canada’s Shuttle Remote Manipulator System (Canadarm) since the early 1980s, Germany’s ROTEX technology experiment in 1993, Japan’s Experimental Test Satellite VII in 1998, America’s Orbital Express on-orbit satellite servicing experiment, America’s Mars Pathfinder rover technology experiment in 1997, twin Mars Exploration Rovers during 2004–2019, Mars Phoenix polar lander in 2008, Mars Science Laboratory’s Curiosity rover since 2011, China’s lunar rovers in 2013 and 2019, and a variety of robots operating on the exterior and interior of the International Space Station including robotic manipulators, free-flying inspection robots, and NASA’s Robonaut-2. With successful uses of space robots in missions over the past several decades, telerobotics and robot autonomy technology have been given a proving ground for demonstrating the utility and practicality of robots for performing tasks in the real world. Each successful robotic mission raises the bar for subsequent missions and increased space robot intelligence becomes more and more essential for accomplishing missions of greater demand and complexity.
Challenges
Space Environment
Creating robots to operate in space has to be adjusted for the variety of environments in space. There are many differences and similarities. The most significant difference is that space-based robots need to operate in a different environment, there’s no air, but there’s also radiation, extreme temperatures, and changing illumination conditions.
These differences affect how the robot operates, but they also require that the robot be constructed of different materials. Space conditions impose severe restrictions on the type of materials that can be utilized, the computational capabilities the space robot can utilize, and the energy sources that can be tapped. Typically, space-certified sensors, actuators, and computers are often a generation or two behind their Earth-bound counterparts. This, in turn, imposes restrictions on the algorithms that a space-based robot can implement reliably.
Absence of Gravity
Another constraint on the space-based robot is the absence of gravity. While it might seem the absence of gravity would be an asset, the robot doesn’t operate the same without gravity, so adjustments need to be made in the mechanical design. In the case of orbiting spacecraft, the absence of gravitational forces makes moving in space tricky. The closest Earth-based analog we have for space-based robots is robots operating in the deep ocean, where they have to face some of the same challenges.
Energy Sources
Another challenge for extreme terrain mobility is power and communication. Energy sources can be difficult to find in areas of extreme terrain. For example, the Cabeus Crater located near the Moon’s south pole lies in a state of near-perpetual darkness, thus precluding the use of solar power. Even with consistent access to sunlight, cold traps like caves and crevices along crater walls would be difficult to investigate for prolonged periods. Rough terrain consisting of tall peaks, deep craters, or canyons naturally restricts access to sunlight, and rovers charged with exploring these regions must be able to survive on a limited energy budget. Such terrains also present challenges for Earth-based communications with the rover, particularly in the absence of an orbiting communication satellite.
Heat Dissipation
A problem that is unique to the robotic exploration of cold regions, such as the surface of Europa and other icy moons, is heat dissipation. In addition to traditional vehicle thermal engineering for ultra-cold climates, robotic explorers designed for these environments must minimize thermal pollution to nearby terrain so as to avoid disrupting the scientific analysis of volatile components. They must also be designed with sufficient exposed surface area to allow for adequate thermal regulation.
We Need More Sophisticated Technologies
Due to the hazardous nature of the environments and the unique mechanical, thermal, and avionics designs likely required for extreme-terrain mobility, advanced control, and autonomy strategies will be needed to operate extreme-terrain rovers safely. This will require more sophisticated onboard sensing, perception, planning, and computational capabilities than for state-of-the-art flat-topography rovers due to the larger variations in terrain, more complex dynamics, and tighter operational constraints. Of all the avionics systems, flight-qualified processors typically represent the bottleneck on computational capability and hence restrict the types of algorithms and approaches that may be considered. Unfortunately, the performance gap between current standard commercial processors and flight processors remains quite large. In the commercial sector, the trend is moving toward greater parallelism and multiple-core processing.
Achieving comparable levels of computation, power consumption, robustness, and reliability with a similar form factor on space-rated processors in the face of increasing cost constraints remains an open problem.
Conclusion
As explained, the technical goals of Robotics and autonomous systems are to extend human’s reach or access into space, expand our abilities to manipulate assets and resources, prepare them for human arrival, support human crews in their space operations, support the assets they leave behind, and enhance efficiencies of mission operations across the board. Advances in robotic sensing and perception, mobility and manipulation, rendezvous and docking, onboard and ground-based autonomous capabilities, and human-robot integration will drive these goals.
Autonomous space exploration robots are still in their infancy. Many challenges have yet to be solved. Progresses in these areas will definitely increase the efficiency of autonomous explorers. The development of autonomous space explorers also opens up exciting possibilities, including commercial use, such as exploiting mineral resources on other planets. Eventually, hopefully in the near future, we will have autonomous commercial space robotic explorers building infrastructures for human settlement on Mars. To meet the long-term need for exploration and science, various robotic mission concepts need to be brought, and research efforts are required from both academia and industry. The future of space explorations will bring even larger goals and require space robots with diverse locomotion and autonomy.